Curiosity Rover - Sols 4359-4361: The Perfect Road Trip Destination For Any Rover! Earth planning date: Friday November 8, 2024.
After the excitement of Wednesday’s plan, it was a relief to come in today to hear that the drive toward our exit from Gediz Vallis completed successfully and that we weren’t perched on any rocks or in any other precarious position. This made for a very smooth planning morning, which is always nice on a Friday after a long week.
But that isn’t to say that Curiosity will be taking it easy for the weekend. Smooth planning means we have lots of time to pack in as much science as we can fit. Today, this meant that the geology group (GEO) got to name eight new targets, and the environmental group (ENV) got to spend some extra time contemplating the atmosphere. Reading through the list of target names from GEO felt a bit like reading a travel guide — top rocks to visit when you’re exiting Gediz Vallis!
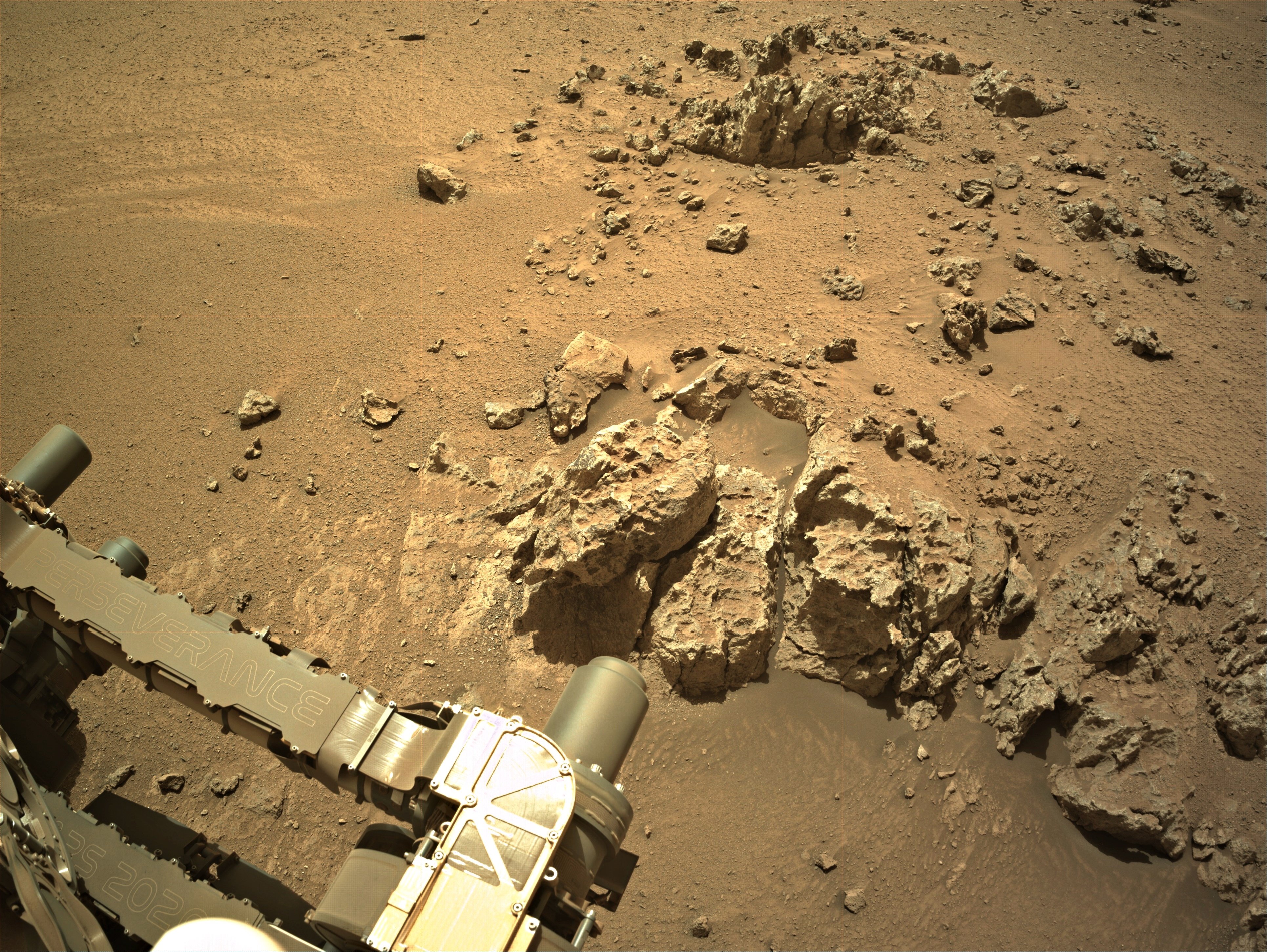
If you look to the front of your rover, what we refer to as the “workspace” (and which you can see part of in the image above), you’ll see an array of rocks. Take in the polygonal fractures of “Colosseum Mountain” and be amazed by the structures of “Tyndall Creek” and “Cascade Valley.” Get up close and personal with our contact science targets, “Mahogany Creek,” “Forester Pass,” and “Buttress Tree.” Our workspace has something for everyone, including the laser spectrometers in the family, who will find plenty to explore with “Filly Lake” and “Crater Mountain.” We have old favorites too, like the upper Gediz Vallis Ridge and the Texoli outcrop.
After a busy day sightseeing, why not kick back with ENV and take a deep breath? APXS and ChemCam have you covered, watching the changing atmospheric composition. Look up with Navcam and you may see clouds drifting by, or spend some time looking for dust devils in the distance. Want to check the weather before planning your road trip? Our weather station REMS works around the clock, and Mastcam and Navcam are both keeping an eye on how dusty the crater is.
All good vacations must come to an end, but know that when it’s time to drive away there will be many more thrilling sights to come!
Written by Alex Innanen, Atmospheric Scientist at York University
Source for this blog and the archive of all blogs (with all the links and the original raw images etc) https://science.nasa.gov/blog/sols-4359-4361-the-perfect-road-trip-destination-for-any-rover/
These blog updates are provided by self-selected Mars Science Laboratory mission team members who love to share what Curiosity is doing with the public.
Dates of planned rover activities described in these reports are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.
Image credits: NASA/JPL-Caltech








The rover is currently driving up the rim wall of Jezero crater. The rim wall was created by a huge impact in Mars early history. So we could be looking at some of the oldest rocks that were uplifted during the impact. I'm clearly not a geologist, so it will be interesting to see the results of the investigations of the rocks in this region by the science team.