1
NASA's Curiosity Mars Rover
421 readers
36 users here now
A lemmy community for scientific discussion of the Curiosity Rover and Mars Science Laboratory.
founded 1 year ago
MODERATORS
2
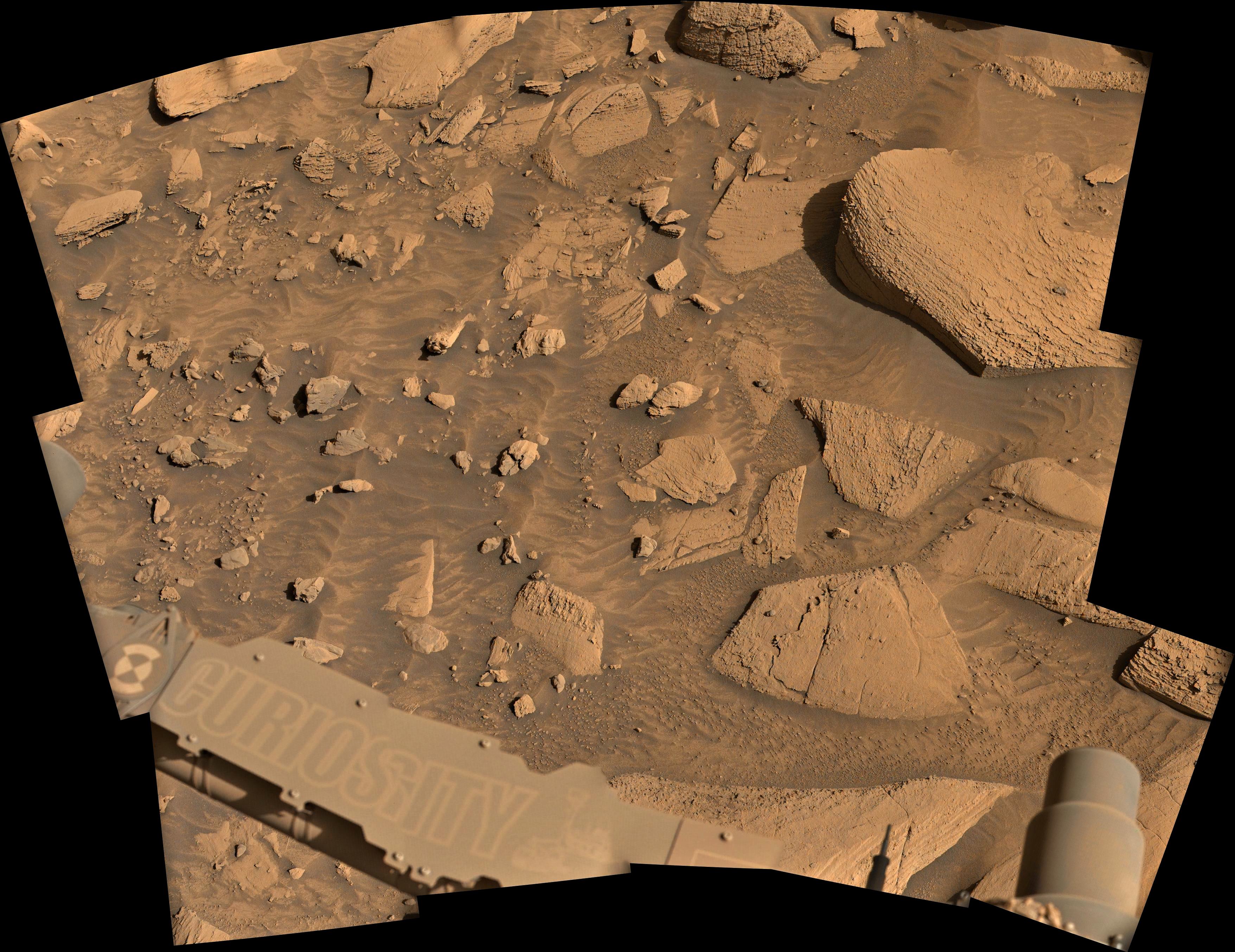
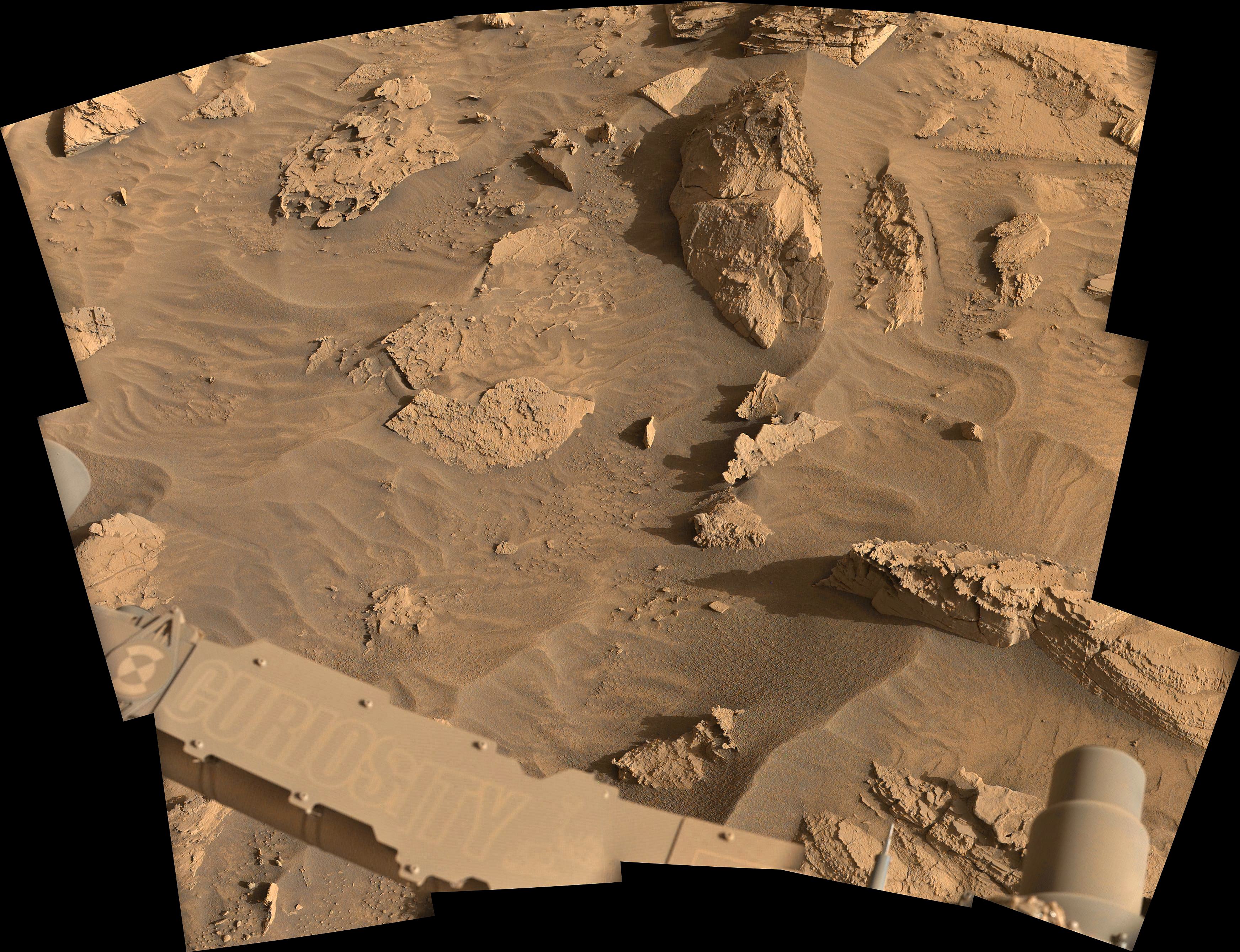
Curiosity's latest workspace imaged on mission sol 4471 March 5, 2025 ) after a drive of 19.6 meters (64.4 ft). This composite image is assembled from 15 overlapping L-MastCam subframe images, the images were Bayer reconstructed before assembly. The workspace covers an area about 2 meters (~6.5 feet) across, and shows details within the workspace accessible to the instruments and tools on the rover's 2 meter-long robotic arm. Image Credits: NASA/JPL-Caltech/MSSS/fredk

3
4
11
4471 - New workspace after a drive during March 5, 2025. Details in the body of this post
(lemmy.world)
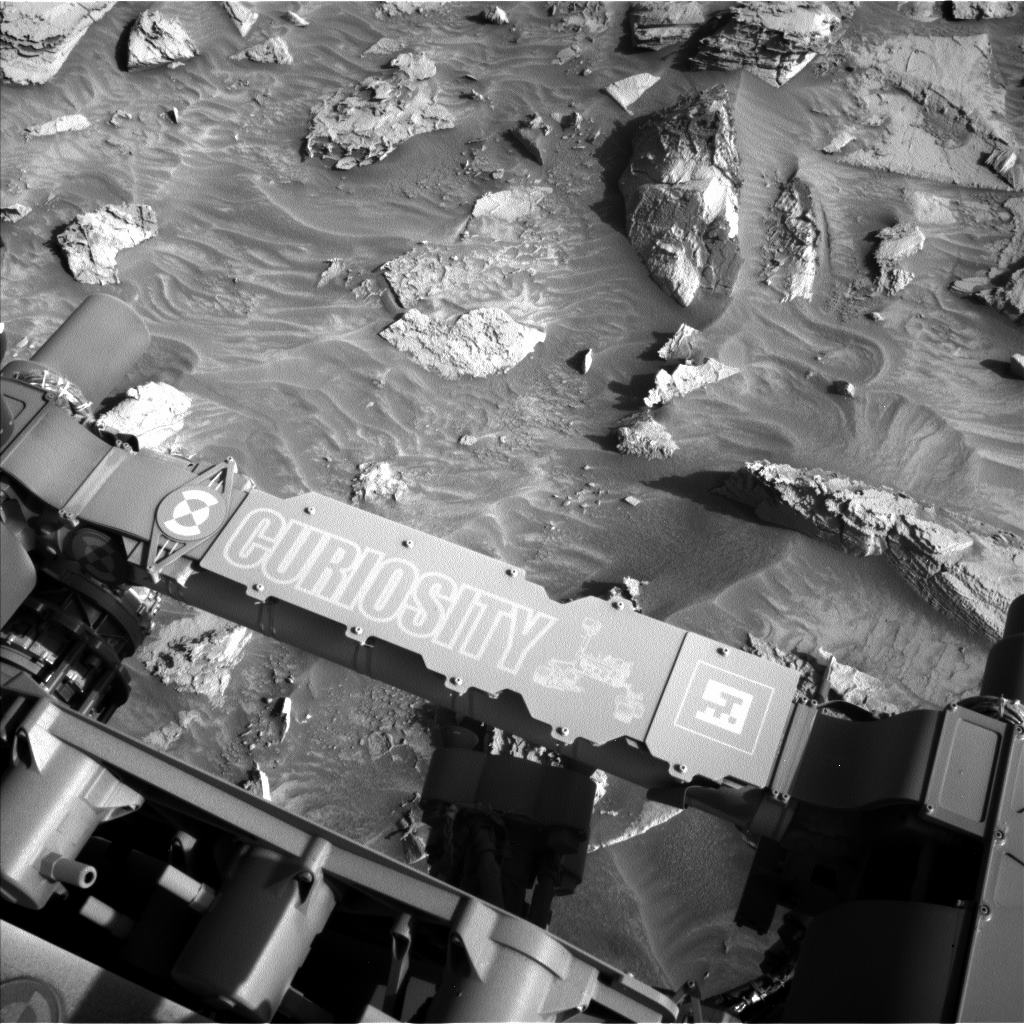
Image - Left navigation camera - Sol 4471 (2025-03-05T04:39:47.000Z)
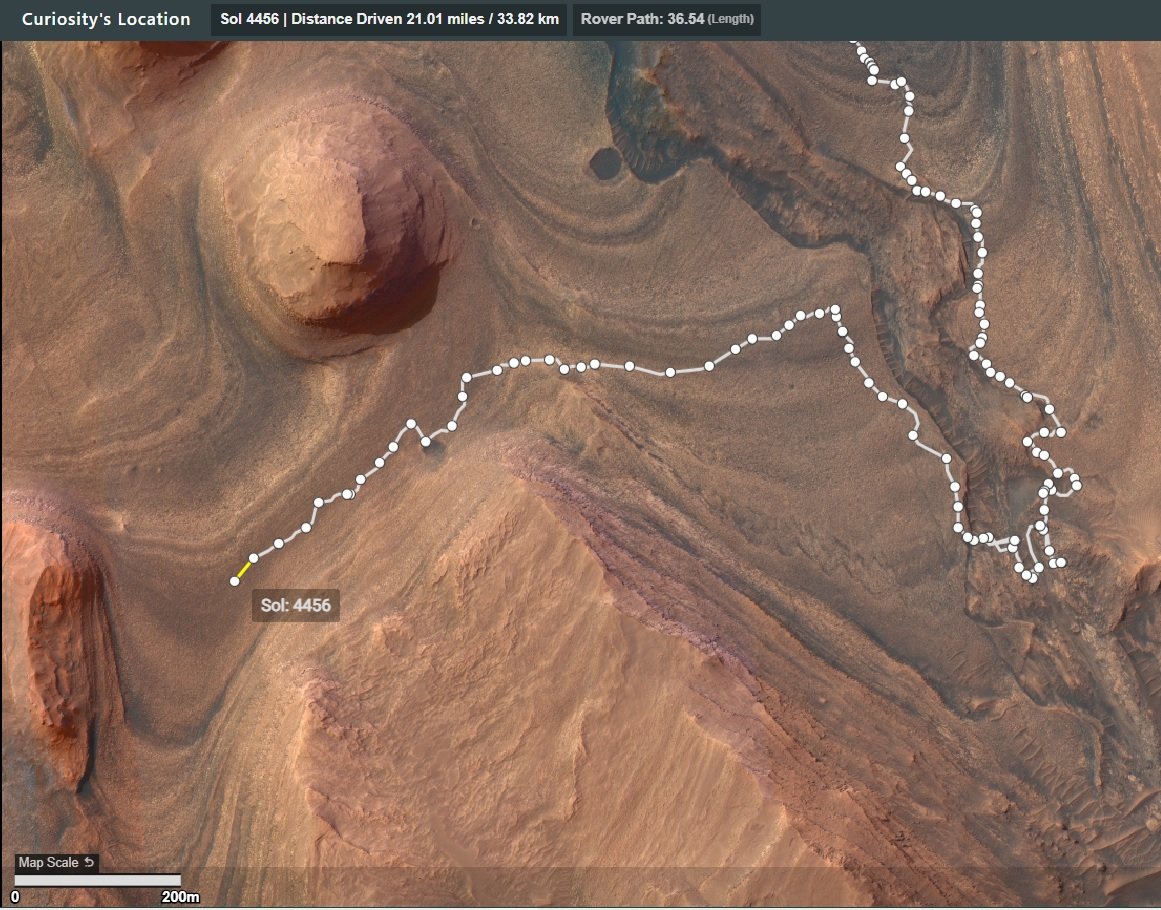
Map:
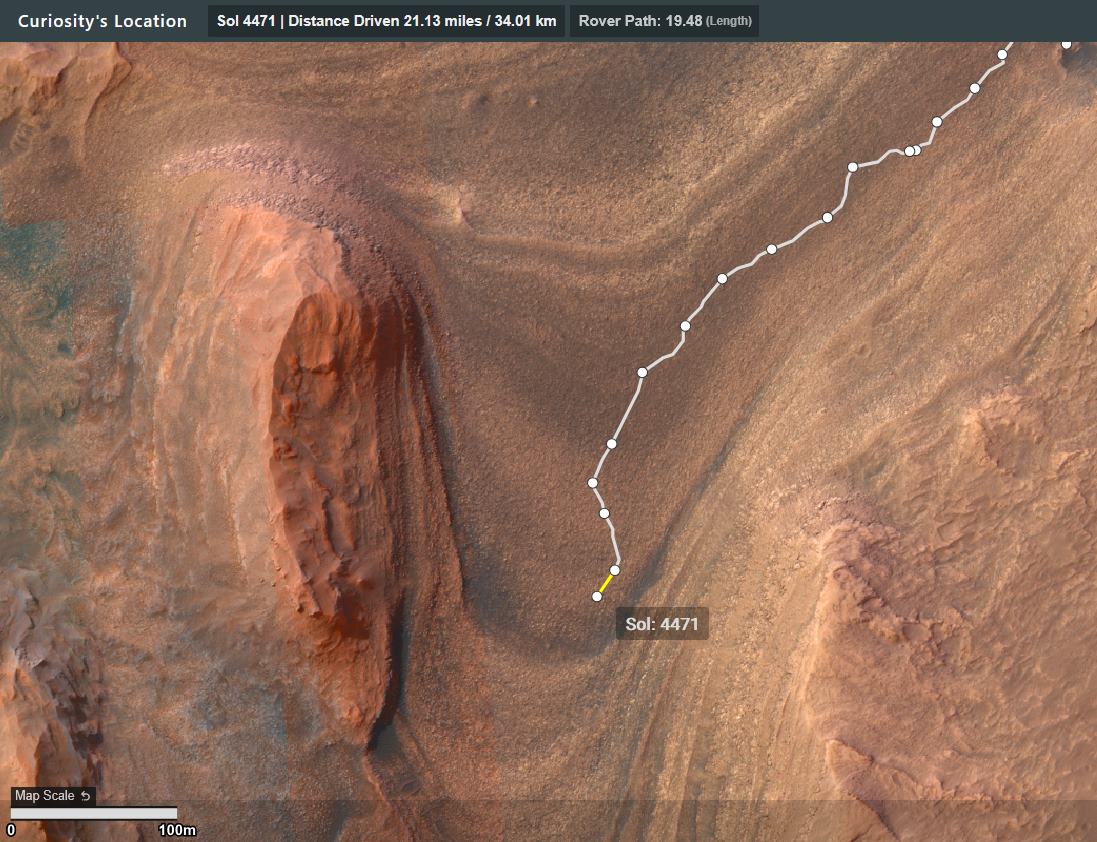
Drive details:
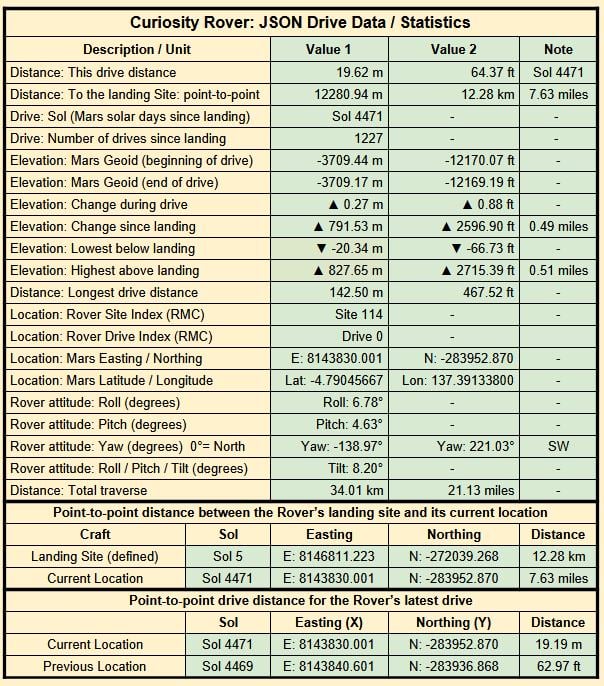
Credits: NASA/JPL-Caltech/UofA

5
6
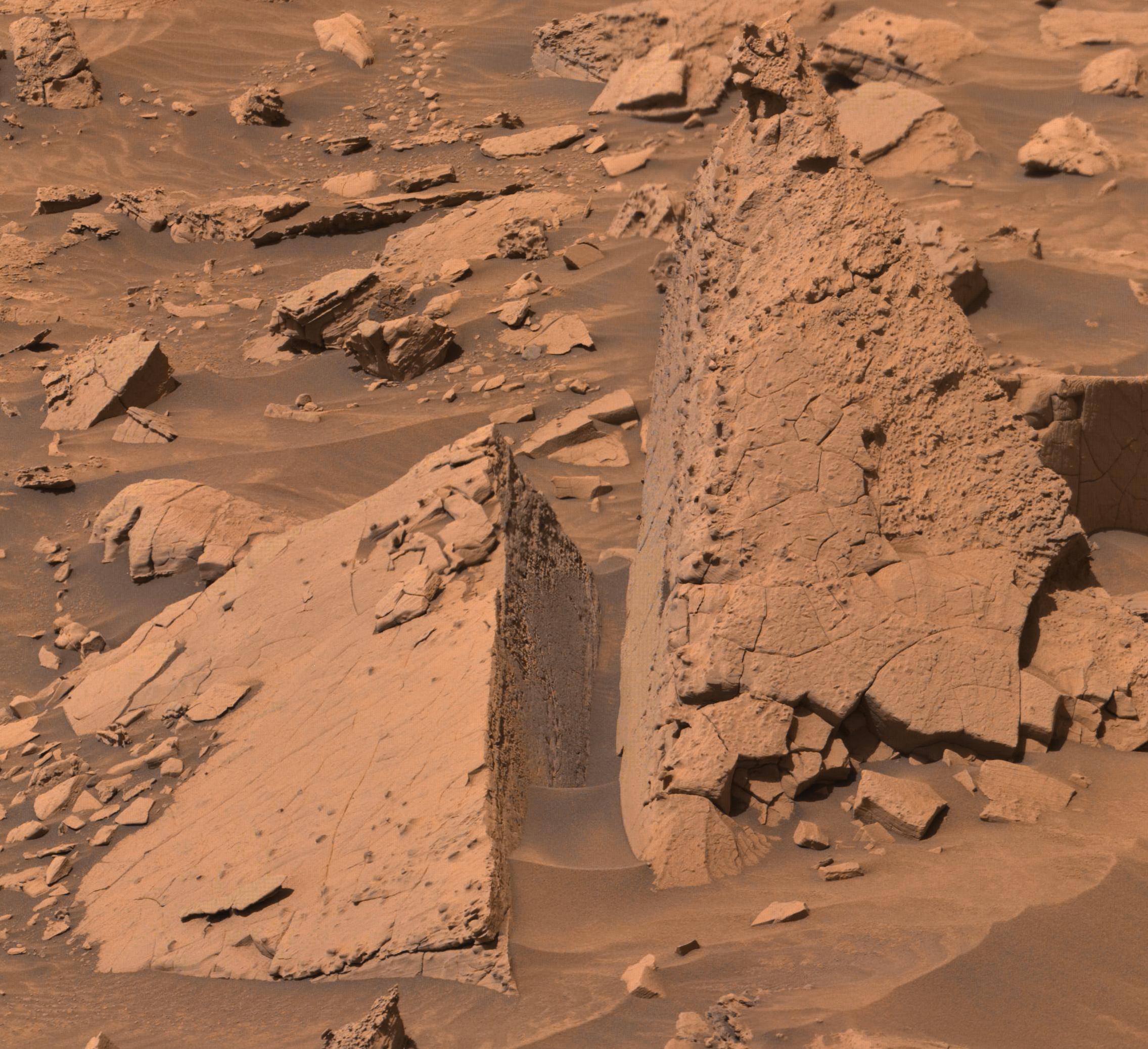
15 overlapping Bayer reconstructed L-MastCam images assembled into a mosaic using MS-ICE.
The images were acquired on March 3, 2025 but only placed on the mission server a few hours ago.
Credits: NASA/JPL-Caltech/MSSS/fredk
7
8
9
4469 - New workspace after a drive of ~36 m (120 ft) South during Sol 4469. Map and drive data in the body of this post
(lemmy.world)
Map -
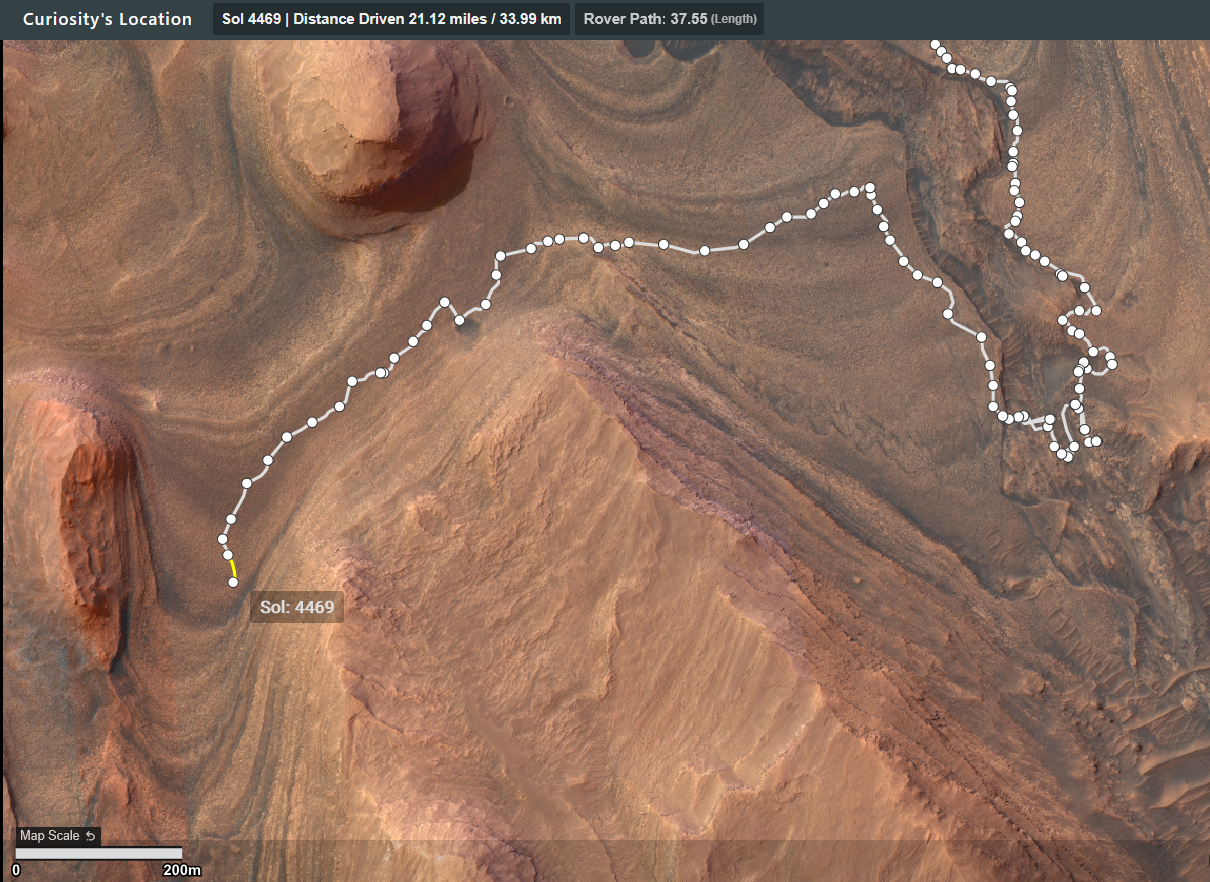
Drive Data -

9
10
Curiosity continuing its traverse to the southwest.

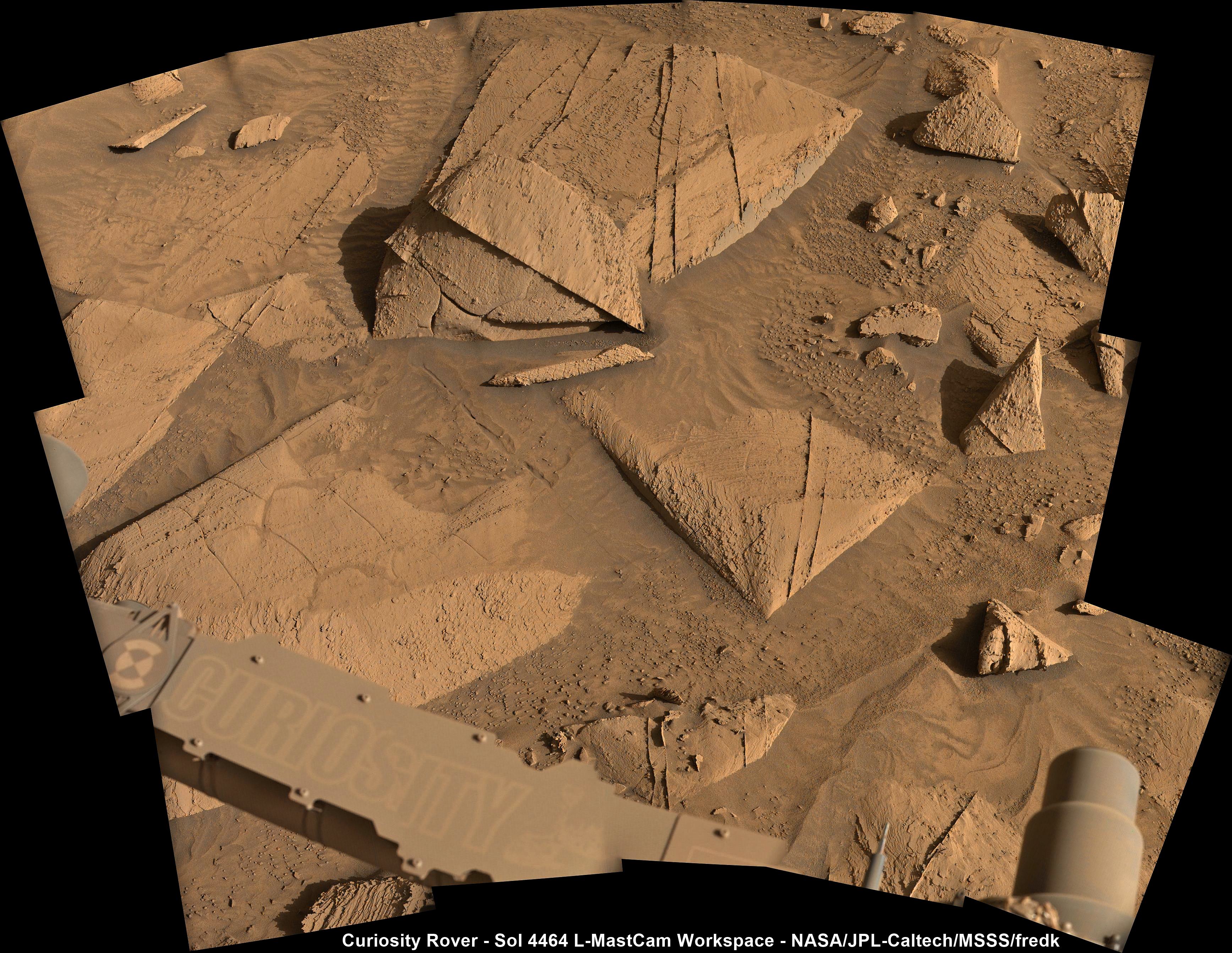
11
Curiosity Rover - Sol 4464 L-MastCam Workspace Assembled in MS-ICE from 15 overlapping Bayer reconstructed frames Credits: NASA/JPL-Caltech/MSSS/fredk
12
13
14
15
Credits for the de-Bayered frames: NASA/JPL-Caltech/MSSS/fredk
16
New workspace (L-NavCam) and details of the drive of 49.56 meters SSW during sol 4462 to site 113.2040 will be posted in the comments
NASA/JPL-Caltech
17

18
19
20
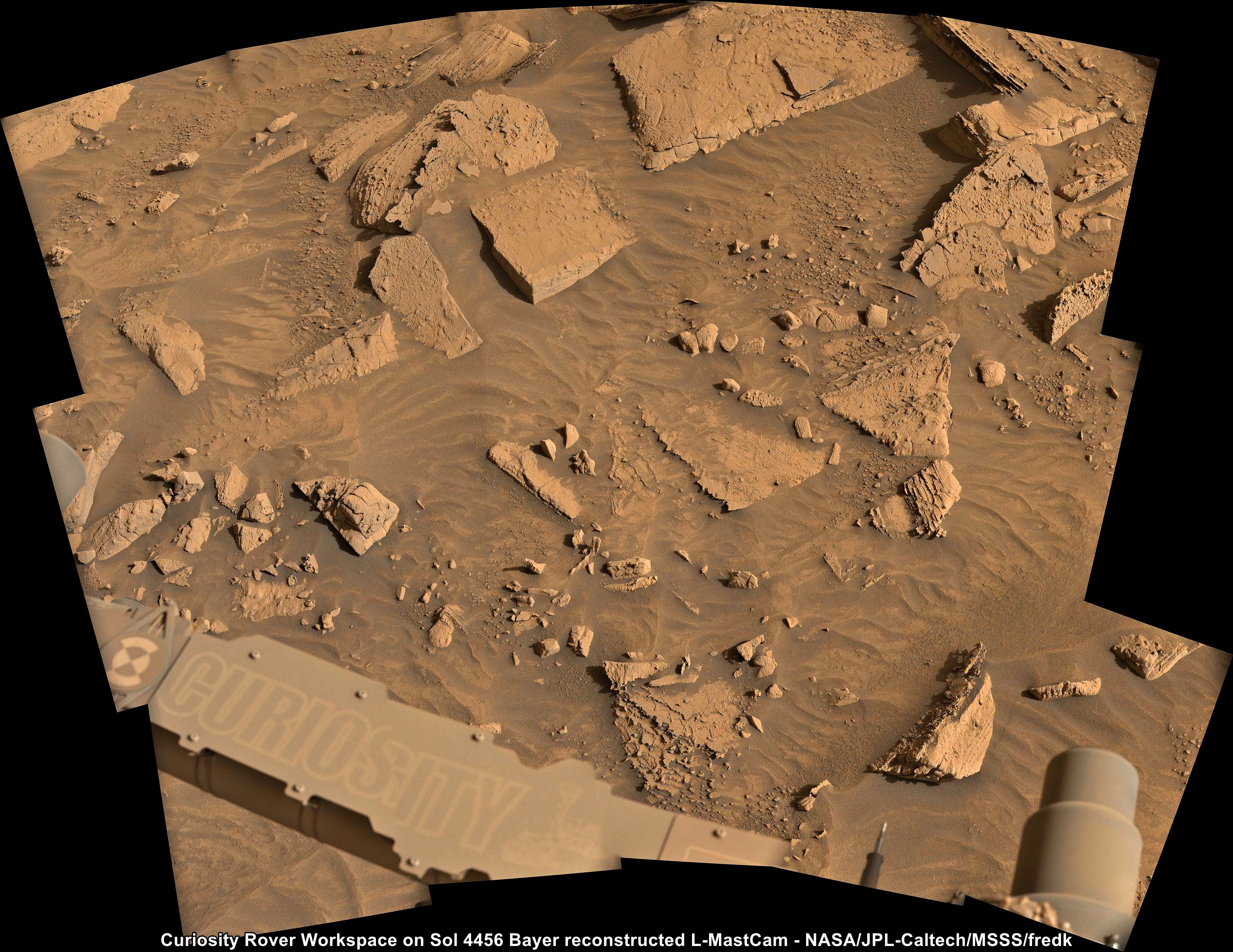
21
L-MastCam mosaic of the sol 4456 Workspace. Assembled in MS-ICE using fredk's Bayer reconstructed frames
15 frames from the L-MastCam
Credits: NASA/JPL-Caltech/MSSS/fredk
22
Drive data
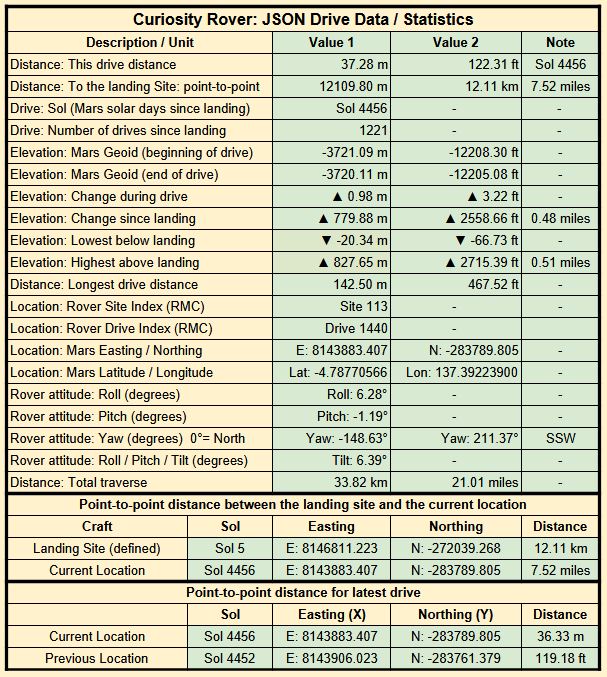
New workspace
Credits: NASA/JPL-Caltech/UofA
23
Sol 4454 MastCam mosaic of target “Pyramid Lake” from Kevin M Gill
Credit: NASA/JPL-Caltech/MSSS/Kevin M. Gill
24
25

Earth planning date: Wednesday, Feb. 12, 2025
I woke up this morning to my weather app telling me it felt like minus 15° C (5°F) outside. On days like this, it can take me a little longer to get myself up and out into the world. Curiosity has a similar problem — as we head toward winter and it gets colder and colder in Gale Crater, Curiosity has to spend more time warming up to do things like driving and all our good science. I’ve also been watching a couple winter storms that are expected in the next few days here in Toronto. Luckily, Curiosity doesn’t have to deal with snowstorms, and our drive in the last plan went ahead as planned and put us in a good position to go ahead with contact science today, a relief after having to forego it on Monday.
The contact science location that the geology team chose is called “Catalina Island,” the flat rock you can see in almost the center of the image above. As you can likely also see above, there’s a whole jumble of rocks in that image, and Mastcam and ChemCam have picked out a couple others to take a look at. These are “Point Dume,” which will be the target of ChemCam’s laser spectrometer, and “Whittier Narrows,” on which Mastcam will image some linear features. Mastcam and ChemCam are also turning their gazes further afield for Mastcam targets “Cleghorn Ridge,” “Cuyamaca Peak,” “Kratka Ridge,” and two long-distance ChemCam mosaics of the top of the Wilkerson butte and a spot a little further down known as “Pothole Trail.”
Much like I’m keeping an eye out the window on the changing weather here, Curiosity is also continuing to keep an eye on the environment in Gale Crater. Even though it’s not the dusty season, we continue to monitor the dust around us and in the atmosphere with a dust-devil survey and a tau. But we’re especially interested in what the clouds are up to right now, which we’re checking in on with our normal zenith and suprahorizon movies, and our cloud-season-only Phase Function Sky Survey. This is a series of movies covering the whole sky that we can use to determine how sunlight interacts with the individual water-ice crystals in the clouds.
Written by Alex Innanen, Atmospheric Scientist at York University
view more: next ›