51
NASA's Perseverance Mars Rover
1461 readers
34 users here now
On the plains of Jezero, the secrets of Mars' past await us! Follow for the latest news, updates, pretty pics, and community discussion on NASA and the Jet Propulsion Laboratory's most ambitious mission to Mars!
founded 1 year ago
MODERATORS
54
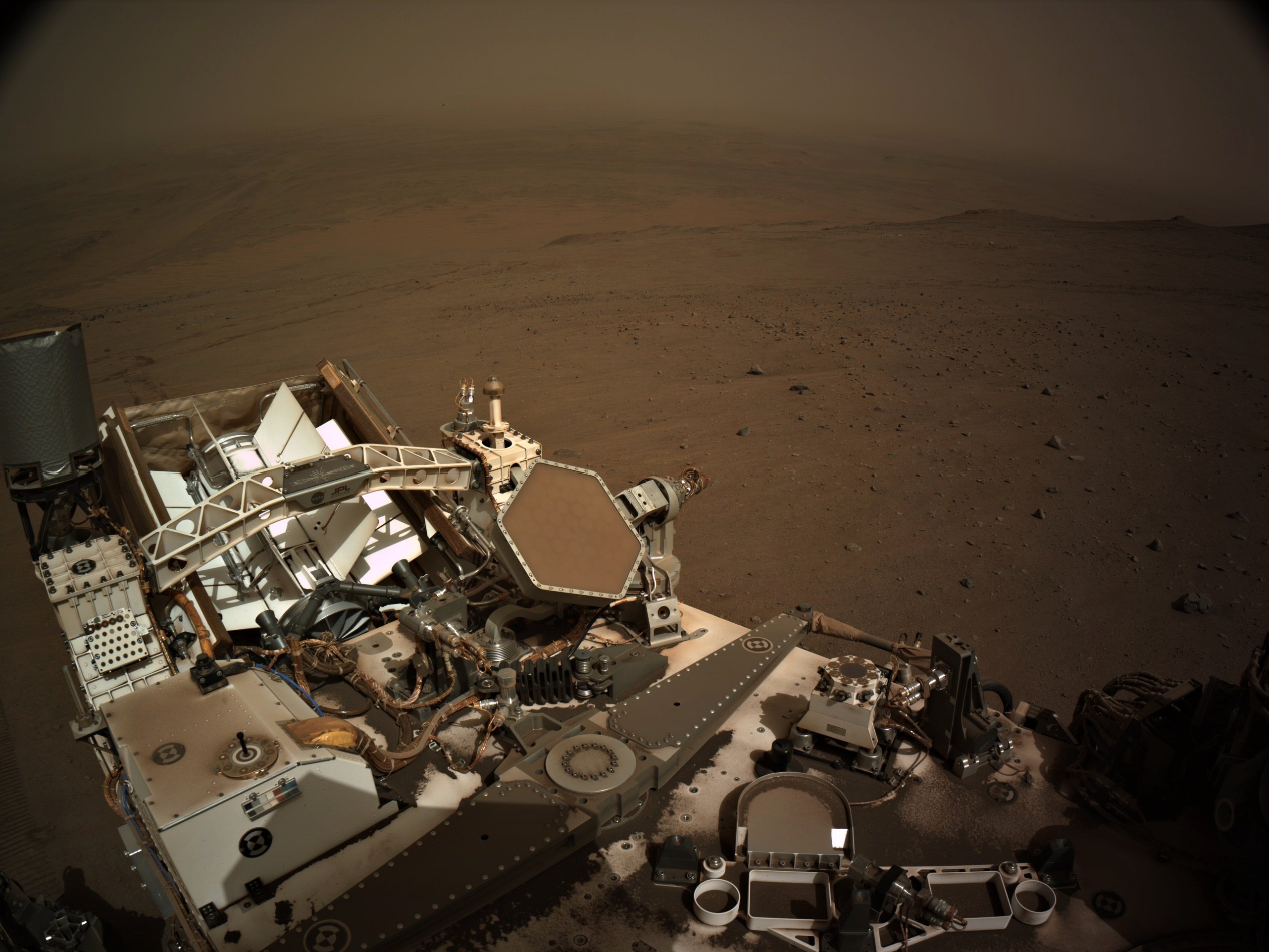
Sol 1131 - end-of-drive 4-tile processed NavCam at site 91-1928 (October 27, 2024
Still waiting for the official data, but it looks to be close to 50 meters Northeast of its position on sol 1308
55
56
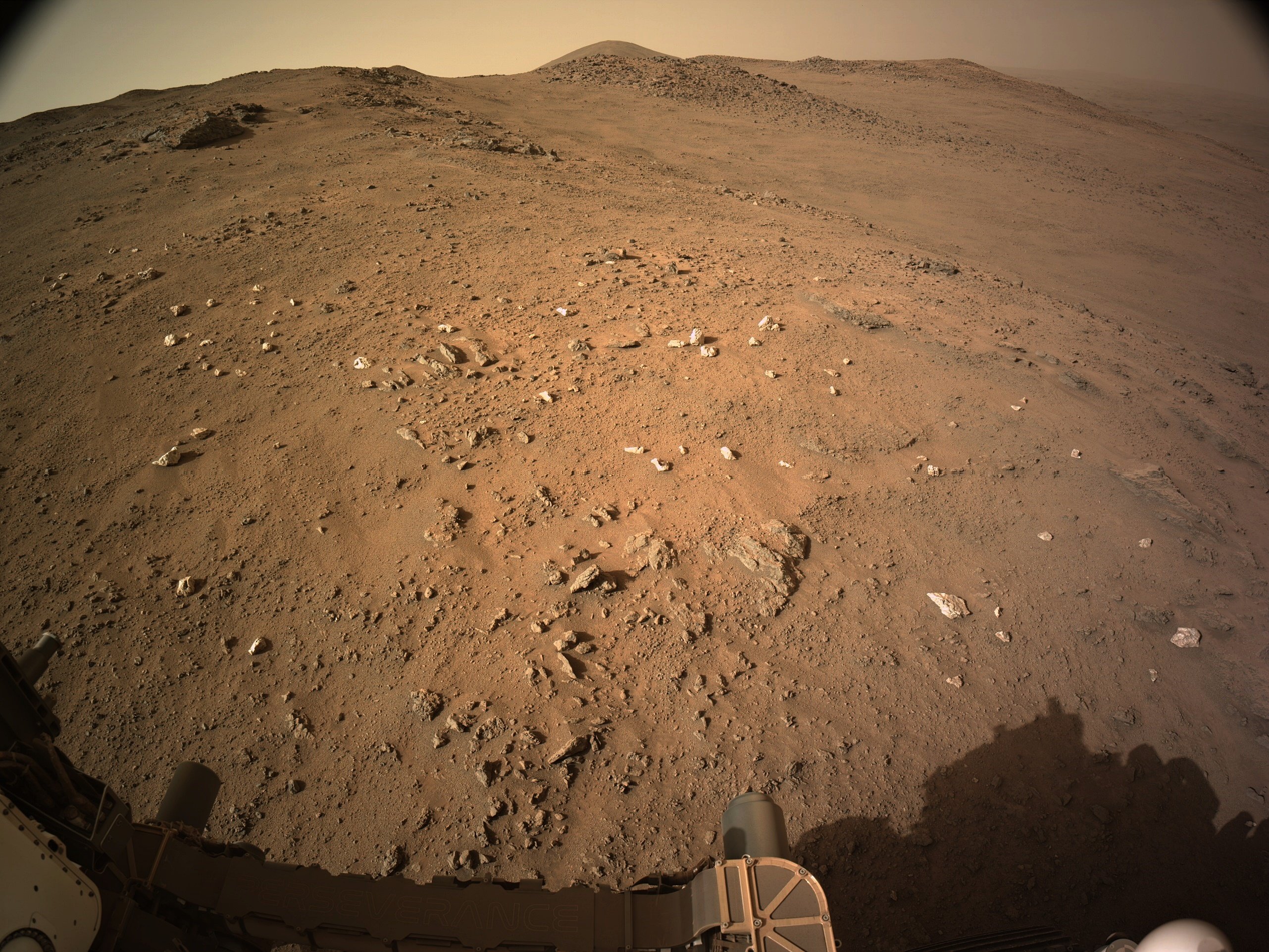
R-MastCam-Z at full zoom (110mm) images a craggy rock face of Pico Turquino
The distance the rock face from the rover is approximately to 130 meters / 427 feet
Pico Turquino is one of the science waypoints on the notional path to the summit of the crater rim.
The rim was of Jezero crater is seen in the background (approximately 1.4 km / 0.87 miles from the rover.
The difference between the current elevation of the rover and the crater rim at that location is approximately 250 meters / 820 feet
The upper part of the Pico Turquino butte stands about 25 meters / 82 feet above the base of its scree slope
Perseverance rover acquired this image using its Right Mastcam-Z camera. Mastcam-Z is a pair of cameras located high on the rover's mast.
This image was acquired on October 25, 2024 (Sol 1309) at the local mean solar time of 09:33:48.
Processed using PhotoScape
Image Credit: NASA/JPL-Caltech/ASU/MSSS

57
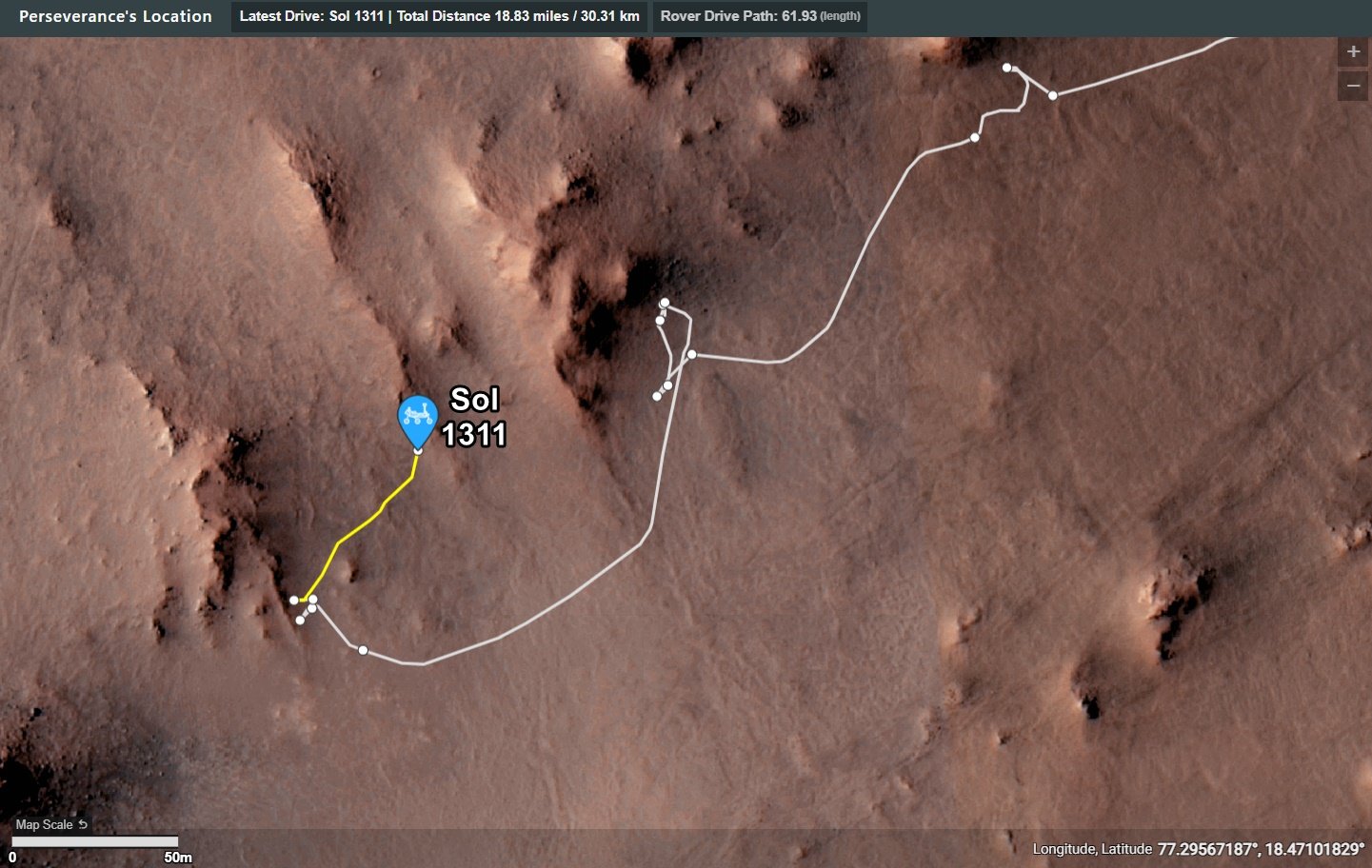
Updated the Map. Didn't find any new place names, so it was mostly just a quick Photoshop work, and a added Sol Number, but it is how it is. Glad I can now update things easily without redoing it completely.

58
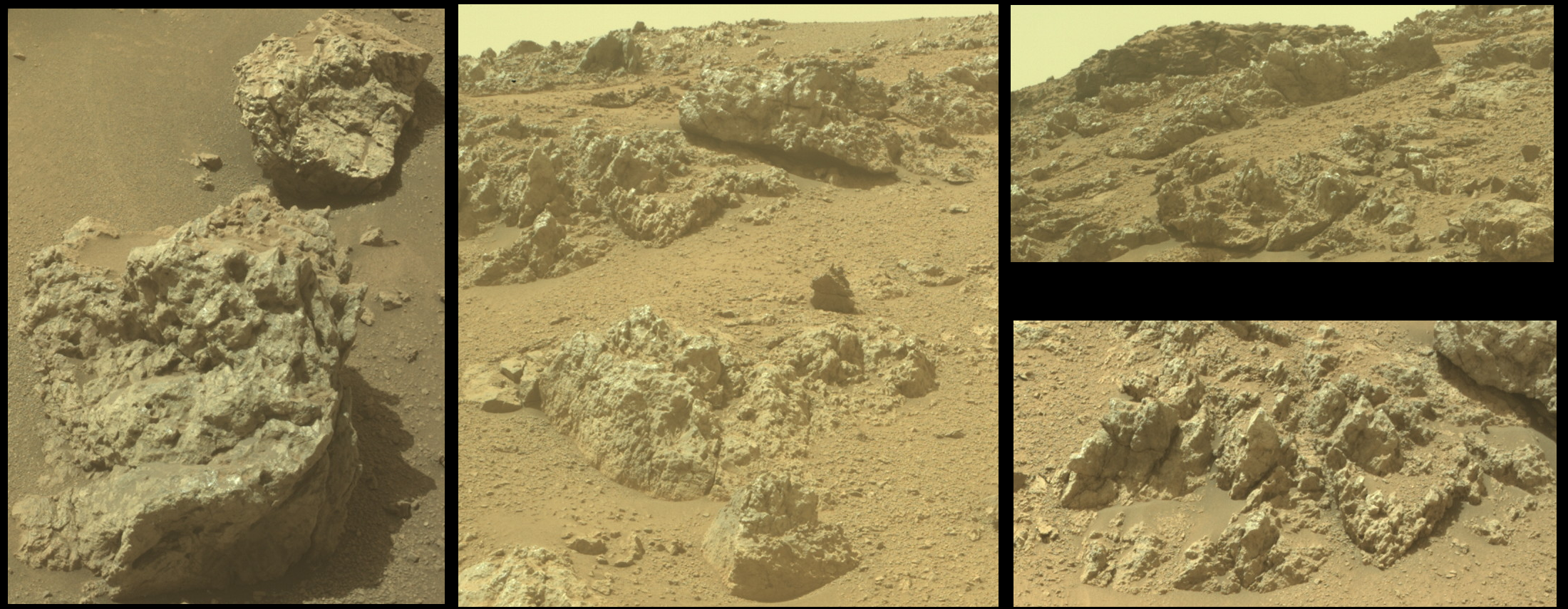
All of the above vignettes were cropped from Front Hazcam images taken on Sol 1308, at about 1 PM local time.
Given that the sun was roughly behind the camera and rover when these images were captured, the complex, light-toned surfaces of these rocks stands out, with glinting reflective patches evident, especially toward the top of the hill. I'd be intrigued to view these rocks in the late afternoon, when shadows are longer and the dusty skies of late winter aren't layering that soft sheen over everything. Given the aggressive driving schedule that the rover team has adopted for climbing the Jezero rim, though, I'm not sure that Percy will stop here for very long...
59
'Pico Torquino' is ~200 meters WSW, it's one of the science waypoints identified by JPL in the crater rim campaign.
Image credits: HRSC: ESA/DLR/FU-BERLIN, CC BY-SA 3.0 IGO CTX: NASA/JPL-Caltech/MSSS HiRISE: NASA/JPL/University of Arizona
60
62
Drive Direction ~WSW 4-tile end-of-drive NavCam NASA/JPL-Caltech

63
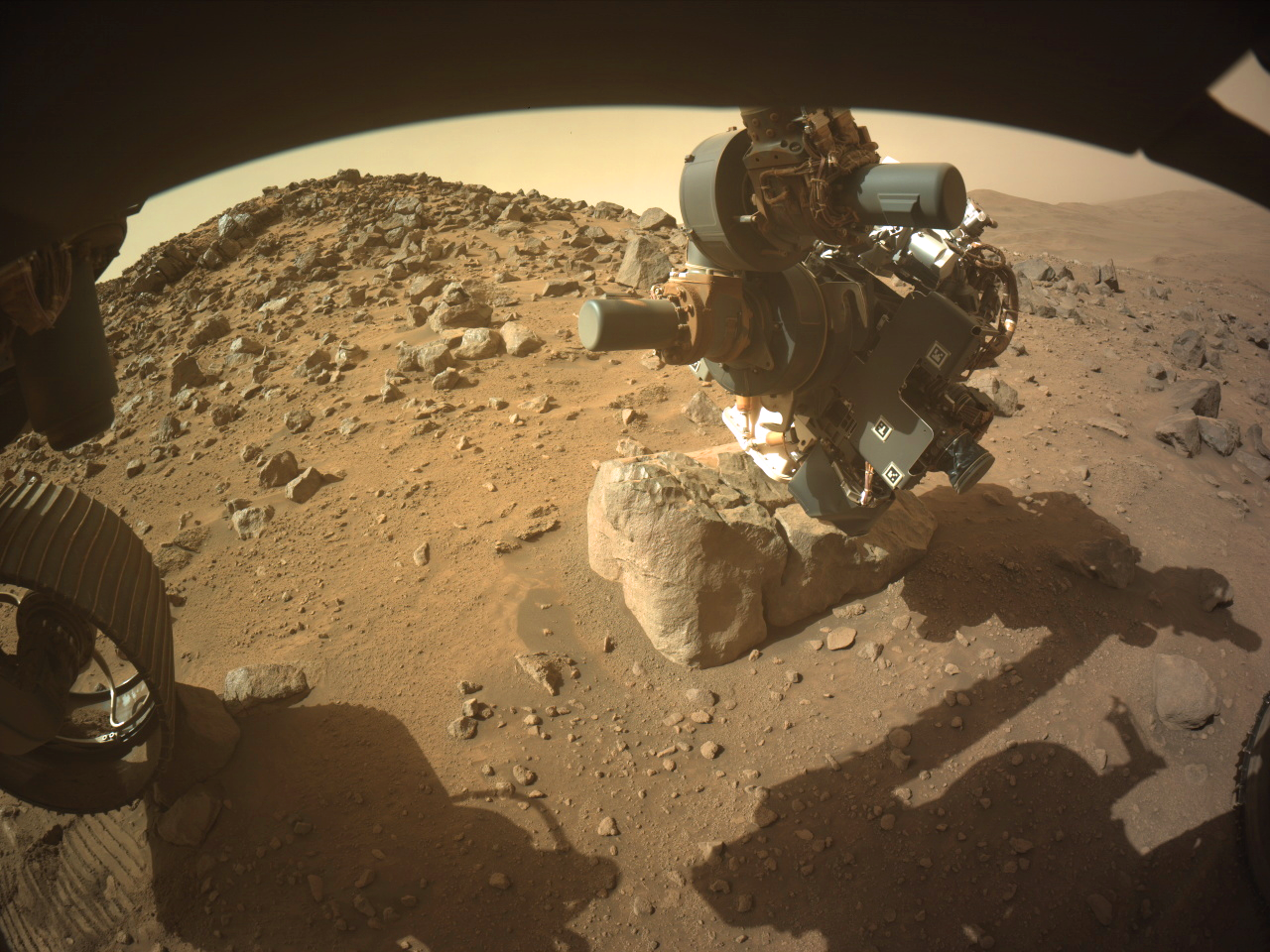
This shot was taken by the arm-mounted WATSON camera at 10:46 PM local time, illuminated by the LED (see also shots lit from the left and right, for perspective). The boulder Percy is analyzing (see here for a daylight view) isn't as reflective as some near the rover, but then again, this part of the Jezero rim seems to have more than enough funky rock coatings for anyone!

64
65
Despite one of the front wheels and the diagonally opposite rear wheel being perched on rocks they commanded the robotic arm to acquire close up images (WATSON) of the surface of this small boulder.
They were probably confident that the rover would not slip. In the past, the use of the arm to obtain close-ups using the turret mounted cameras have meant a delay as the rover was repositioned to firm ground, as s slip could damage the rover.
This image is from the front-left HazCam
NASA/JPL-Caltech
66
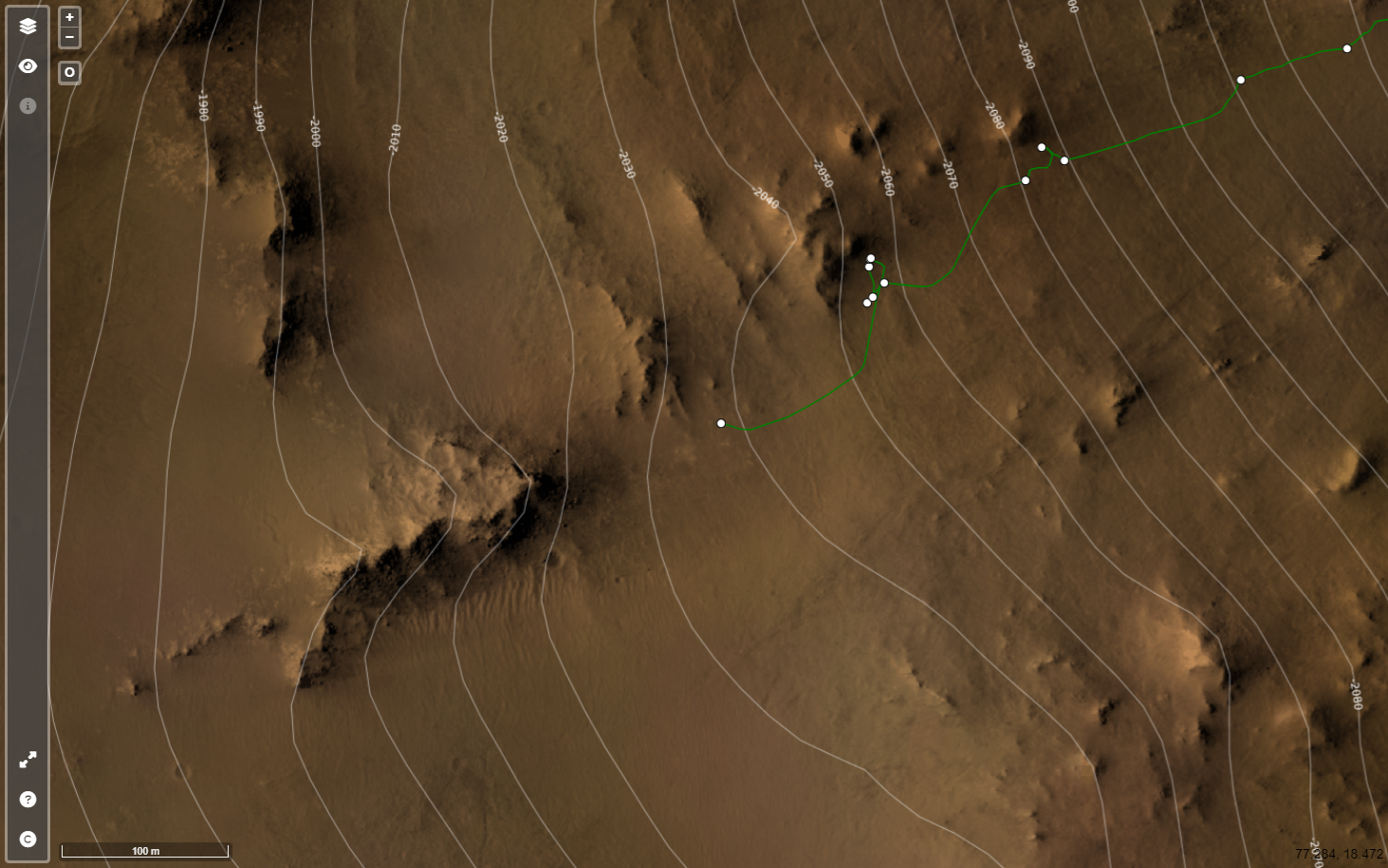
Improved mapping a bit, although I'm still just captioning the official map.

67
NASA/JPL-Caltech/James Sorenson
69
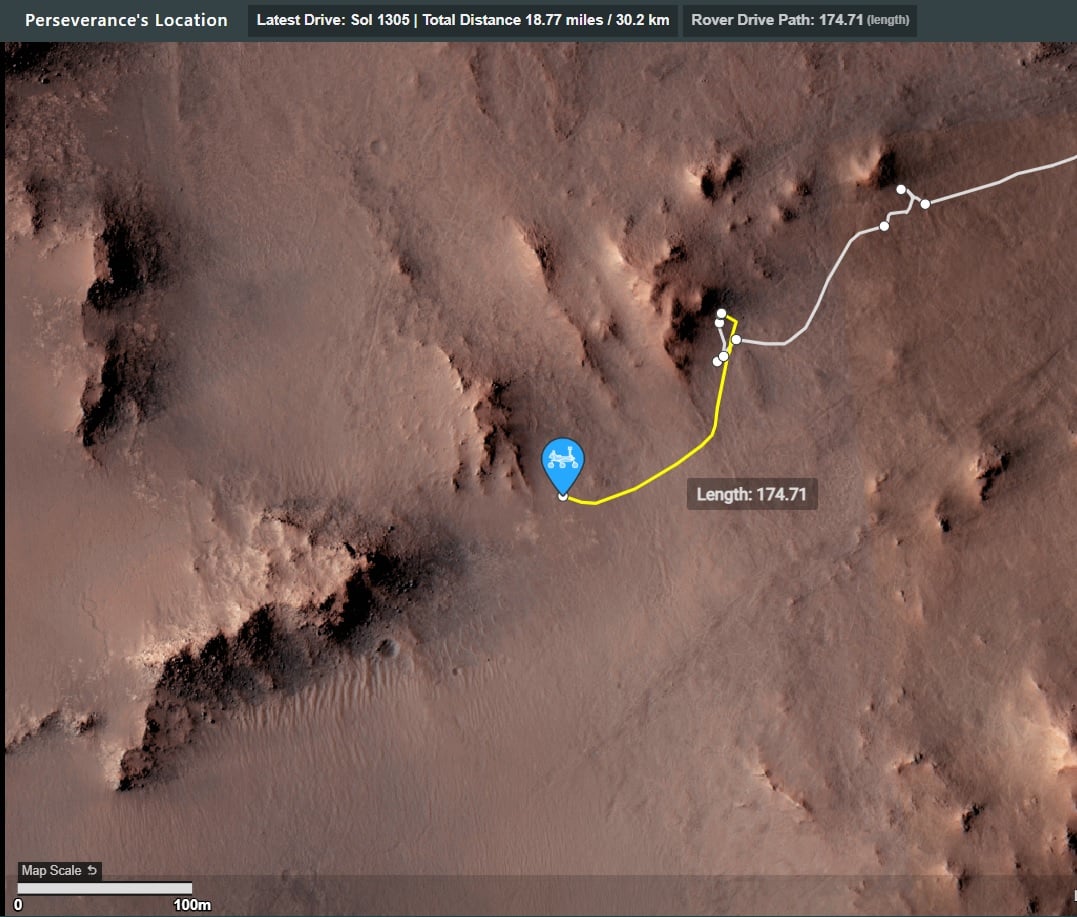
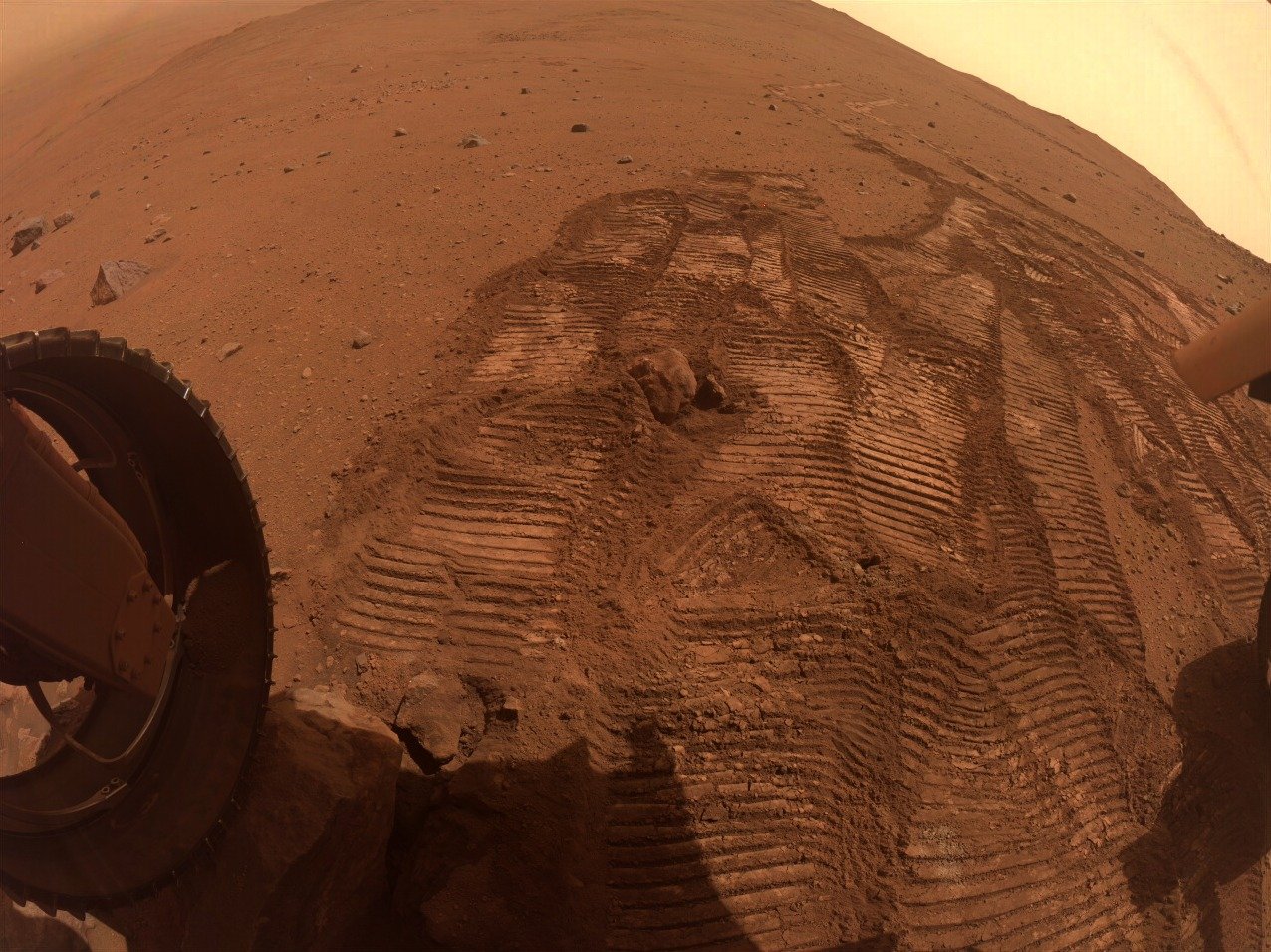
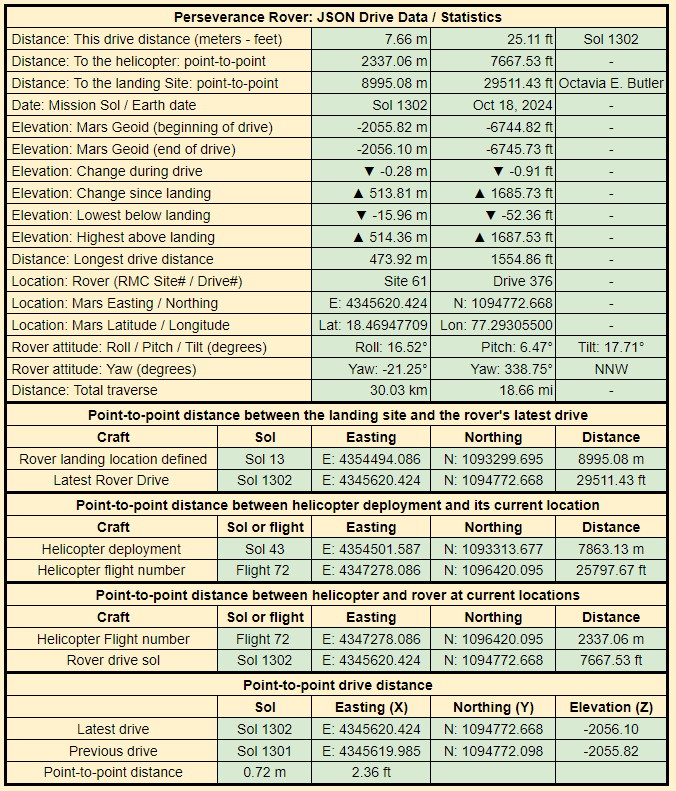
Cropped from a 9-tile post drive R-NavCam. The drive distance may have been over 7 meters, but the point-to-point distance was less than one meter. This long drive may have been a result of the rover having one of its wheels perched on a rock, leaving it unstable for un-stowing the robotic arm.
I'm assuming we'll see some closer inspection of this target over the weekend.


71


{kind=link}
{kind=link}
{kind=link}
{kind=link}
74
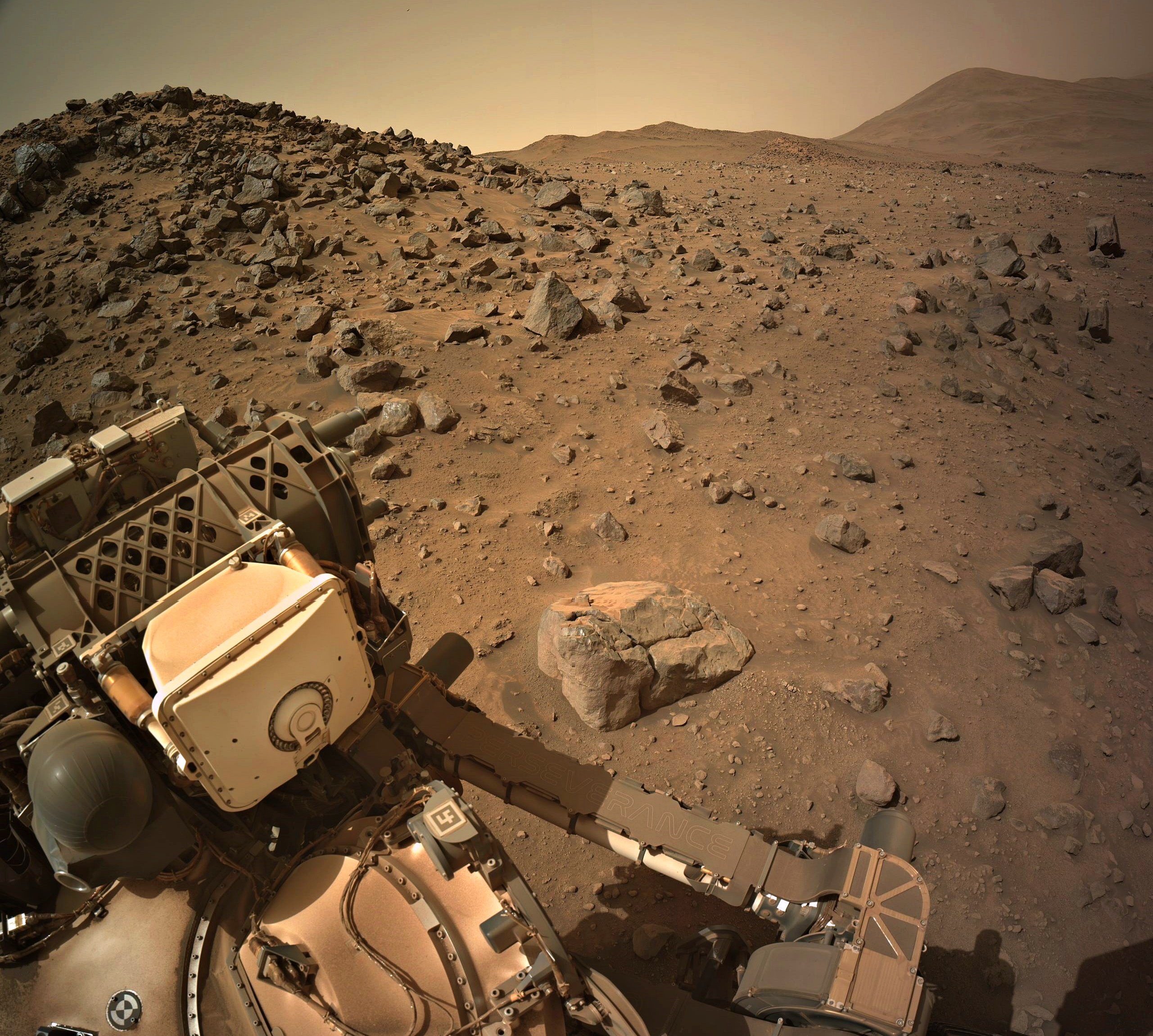
assembled 6 overlapping NavCam tiles to get this simple mosaic of the workspace. Assembled in PhotoScape and MS-ICE.
NASA/JPL-Caltech
75
Not sure why it was such a short drive, the workspace is just sandy regolith, and there was no wheel slip during the drive. Maybe they are deciding which path to take, the notional path to the SSW or head north to some white rocks seen upslope... Decisions decisions ;)
fixed typo in direction of notional path :)